Wetenschappers van de Noorse Universiteit van Life Sciences hebben in samenwerking met de faculteit Computer Science van de Universiteit van Minnesota een robot voor het plukken van op stellingen in tunnels geteelde aardbeien ontwikkeld. De robot is uitgerust met een nieuw ontworpen grijper die bevestigd is aan een arm die op zijn beurt weer vastzit aan een mobiele basis, voorzien van een RGB-D camera.
De nieuwe grijper kan zijn vingers openen om het fruit 'op te slokken'. Aangezien hij ontworpen is om de vruchten en niet de stelen te plukken, heeft hij de juiste locatie nodig. De grijper is bestand tegen lokalisatiefouten van de optische module en is voorzien van een geïntegreerde bak, waarin het fruit tijdens het plukken, wordt verzameld.
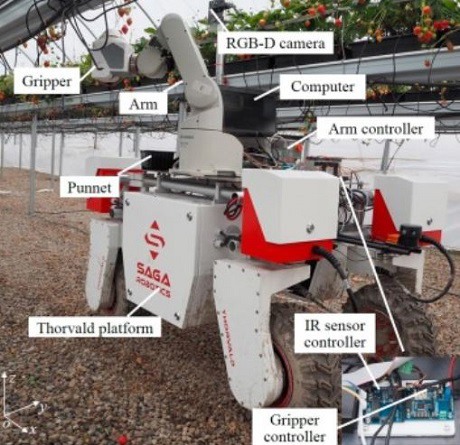
De manipulator hoeft niet heen en weer te bewegen tussen iedere aardbei en beschikt over een afzonderlijke punnet zodat er sneller kan worden geplukt. Het optische systeem detecteert rijpe en bereikbare aardbeien. Deze componenten zijn in het volledige systeem geïntegreerd dat aanvankelijk op vier punten faalde om dat het optische systeem fruit niet detecteerde, dubbel detecteerde, onnauwkeurig lokaliseerde en last had van segmentatiestoringen. De integratie stelt de robot in staat om continu te blijven plukken waarbij het platform met een joystick wordt voortbewogen.
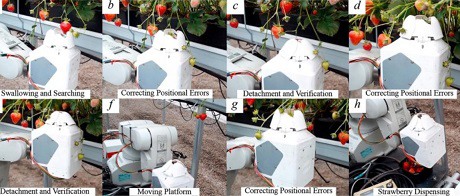
Het systeem is op een teeltbedrijf getest en ook het foutenpercentage werd geanalyseerd. De plukcyclus duurde 7,5 seconde en had op het teeltbedrijf een succespercentage van 53,6%. Het ging het vaakst mis bij het plukken van aardbeien in trossen, waarbij het zowel het detectie-algoritme als de grijper moeite hadden om de aardbeien van elkaar te onderscheiden.
Bron: Ya Xiong, Cheng Peng, Lars Grimstad, Pål Johan From, Volkan Isler, 'Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper', 2019, Computers and Electronics in Agriculture, Vol. 157, pages 392-402.