Onderzoekers van de West Virginia University hebben een plan B bedacht voor de wereldwijde afname van natuurlijke bestuivers door een robotbestuiver te creëren. Het gaat om een zesarmige robot die mensen in kassen kan helpen bij het bestuiven van verschillende gewassen.
Gu's voorstel voor een bestuivingsrobot, ingediend bij het National Robotics Initiative, werd geselecteerd voor een subsidie van
€ 641.000 van het Amerikaanse ministerie van Landbouw. Gu wordt in het project bijgestaan door Jason Gross, universitair hoofddocent en vice-voorzitter voor onderzoek, werktuigbouwkunde en lucht- en ruimtevaarttechniek, en Nicole Waterland, universitair hoofddocent tuinbouw en directeur gecontroleerde omgevingen.

Dit is een computer-gegenereerde afbeelding van StickBug, een zesarmige robot om mensen te assisteren in kasomgevingen door verschillende gewassen te bestuiven. (WVU Robotics)
"StickBug brengt de omgeving in kaart en zodra de robot een algemeen idee heeft van de omgeving, zal het een meer gedetailleerde mapping van de planten opbouwen en weten waar de bloemen zijn en welke bloem bestoven moet worden," vertelt Gu. "Hij zal een plan maken over wat te doen. Dan komt het in de buurt van elk van de planten, begint met zijn zes armen te zwaaien en begint met bestuiven."
Armen voor meerdere doeleinden
Volgens Gu zijn de zes armen vooral bedoeld om de efficiëntie en effectiviteit van de robot te verbeteren. Sommige bloemen kunnen bijvoorbeeld op moeilijk bereikbare plaatsen staan en dan moet de robot twee armen gebruiken; één arm om de tak te grijpen en de andere arm om de bloem te bestuiven.
De robot is verantwoordelijk voor de tijdrovende taken van bloeminspectie, het in kaart brengen, bestuiven en het volgen van de ontwikkeling, zodat telers zich kunnen richten op andere taken in de kas, zoals planten, irrigatie en ongediertebestrijding.
"De focus voor het eindproduct ligt op het proberen de toetredingsdrempel te verlagen om het praktischer werk te maken, zodat telers een robottechnologie in hun kas zouden willen gebruiken," aldus Gross.
De langetermijndoelen voor deze robot zijn het efficiënt verzorgen van individuele gewassen, het verbeteren van de voedselzekerheid tijdens insectendaling, het ondersteunen van indoortuinbouw en het leveren van diensten die verder gaan dan wat insecten kunnen doen, zoals het verzamelen van gegevens over de gewassen.
Gewassen
Evaluatie van StickBug's bestuivingseffectiviteit zal worden uitgevoerd in de WVU Evansdale Greenhouse met behulp van bramen en tomaten. Deze gewassen werden gekozen omdat ze beide voldoende populair zijn in de Verenigde Staten en een economische waarde hebben.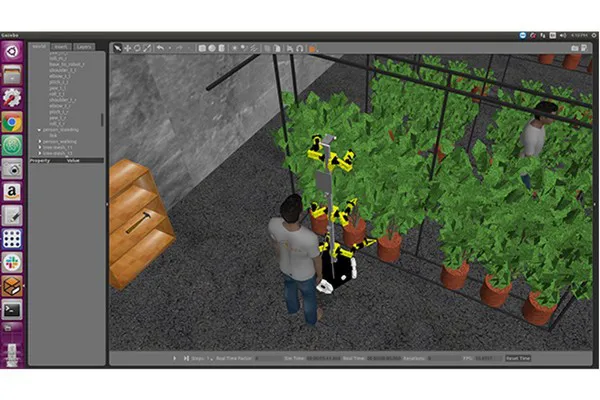 Een animatie helpt het potentieel van StickBug te illustreren. (WVU Robotics)
Een animatie helpt het potentieel van StickBug te illustreren. (WVU Robotics)
Volgens de USDA Forest Service heeft ongeveer 80% van alle bloeiende planten hulp van dieren nodig voor bestuiving en zonder bestuivers kunnen veel gewassen zich niet voortplanten. Gu: "Met behulp van robotbestuivers kunnen telers het tekort aan bestuivers ondervangen en hogere winstkansen verkrijgen door flexibele bestuivingsschema's te plannen die onafhankelijk zijn van de activiteit van bestuivers."
Voor meer informatie:
West Virginia University
www.wvu.edu