Jochen Hemming van de WUR
In april 2012 werden er met het eerste prototype proeven in de paprikakas gedaan. Dit prototype moet in het najaar zelfstandig in een kas kunnen plukken, terwijl een tweede, verbeterde prototype parallel in ontwikkeling is. En dat is lastig, vertelt onderzoeker Jochen Hemming van de WUR op de lustrumdag van de Nederlandse Vereniging Techniek in de Landbouw. “Je werkt met een kwetsbaar product in een ongestructureerde omgeving. De paprika’s zijn verstopt achter bladeren en stengels en er is sprake van clustering; meerdere producten bij elkaar”, somt hij op. “Dan moet je ook nog het snijpunt lokaliseren. En de plant blijft tot in het najaar groeien, dus je ruimte is erg beperkt. ”
 Net als de gewone oogstkarren komt het apparaat op de buis rail te staan en wordt voorzien van een robotarm met sensoren, waaronder meerdere 3D-cameras. Met de informatie van de sensoren wordt een kaart gemaakt. Zo weet de robot waar de rijpe vruchten hangen. “Maar dat is niet genoeg. De robot moet weten of er een groen blad of een groene stengel zit, om de plant niet te beschadigen”, verklaart Hemming. Vervolgens komt de grijparm in actie, die met negen draaipunten op talloze posities kan komen. “Dan moet je bepalen of je de machine wil vastzetten op de vrucht, met bijvoorbeeld zuignappen, of op het steeltje. Dat is lastiger, want die is kleiner.” Vervolgens moet de vrucht gesneden en getransporteerd worden.
Net als de gewone oogstkarren komt het apparaat op de buis rail te staan en wordt voorzien van een robotarm met sensoren, waaronder meerdere 3D-cameras. Met de informatie van de sensoren wordt een kaart gemaakt. Zo weet de robot waar de rijpe vruchten hangen. “Maar dat is niet genoeg. De robot moet weten of er een groen blad of een groene stengel zit, om de plant niet te beschadigen”, verklaart Hemming. Vervolgens komt de grijparm in actie, die met negen draaipunten op talloze posities kan komen. “Dan moet je bepalen of je de machine wil vastzetten op de vrucht, met bijvoorbeeld zuignappen, of op het steeltje. Dat is lastiger, want die is kleiner.” Vervolgens moet de vrucht gesneden en getransporteerd worden. Het eerste prototype van de oogstrobot aan het werk
Het onderzoek vordert gestaag – maar is dit ook een project dat echt in de kassen gaat staan? De komkommer-oogstmachine bleek niet rendabel. Dat is nu anders. “De machine moet ook economisch haalbaar zijn”, vertelt Hemming. “We hebben aan telers het uurtarief gevraagd van hun werknemers en het daarop gebaseerd.” Dat komt erop neer dat de machine elke zes seconden een paprika moet snijden, dag en nacht. “Daar mikken we nu op. Als dat tien seconden wordt, moet-ie ook weer goedkoper worden.” Maar zelfs als dat obstakel uit de weg is geholpen, is de toekomst in de kas nog onzeker. “We werken niet aan een commerciële machine. We proberen de nu nog bestaande bottlenecks op te lossen: kan dit, en zo ja, hoe?”
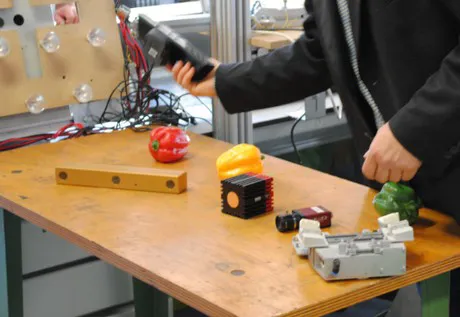
In het laboratorium worden verscheidene 3D-camera's onderzocht


Impressies van de oogstrobot
Bekijk hier een video van de oogstrobot aan het werk in het lab.
Over Crops
Het Crops-project (Clever Robots for Crops) startte in oktober 2010 en duurt vier jaar. In het project werken partijen uit twaalf landen samen om een oogstmachine voor hoogwaardige gewassen, zoals paprika’s, appelen en druiven, te ontwikkelen. Momenteel wordt een prototype van de paprikarobot in elkaar gezet bij Wageningen UR Glastuinbouw – maar de onderdelen zijn in heel Europa ontwikkeld. Zo hebben de techneuten van Jentjens Machinetechniek, in Veghel, het platform ontworpen waarmee het apparaat zich door de kas kan bewegen. De ontwikkeling van de paprika oogstrobot wordt gefinancierd door de EU (CROPS GA no. 246252) en de Productschap Tuinbouw (PT nr. 14555).Voor meer informatie:
www.crops-robots.eu
www.glastuinbouw.wur.nl